
 Blake Blackshear
088bd18adb
add a few more metrics to debug
Blake Blackshear
088bd18adb
add a few more metrics to debug
|
vor 5 Jahren | |
|---|---|---|
| .github | vor 5 Jahren | |
| config | vor 5 Jahren | |
| docs | vor 5 Jahren | |
| frigate | vor 5 Jahren | |
| .dockerignore | vor 6 Jahren | |
| .gitignore | vor 5 Jahren | |
| Dockerfile | vor 5 Jahren | |
| LICENSE | vor 6 Jahren | |
| README.md | vor 5 Jahren | |
| benchmark.py | vor 5 Jahren | |
| detect_objects.py | vor 5 Jahren | |
| diagram.png | vor 5 Jahren |
{kind=link}
README.md
Frigate - Realtime Object Detection for IP Cameras
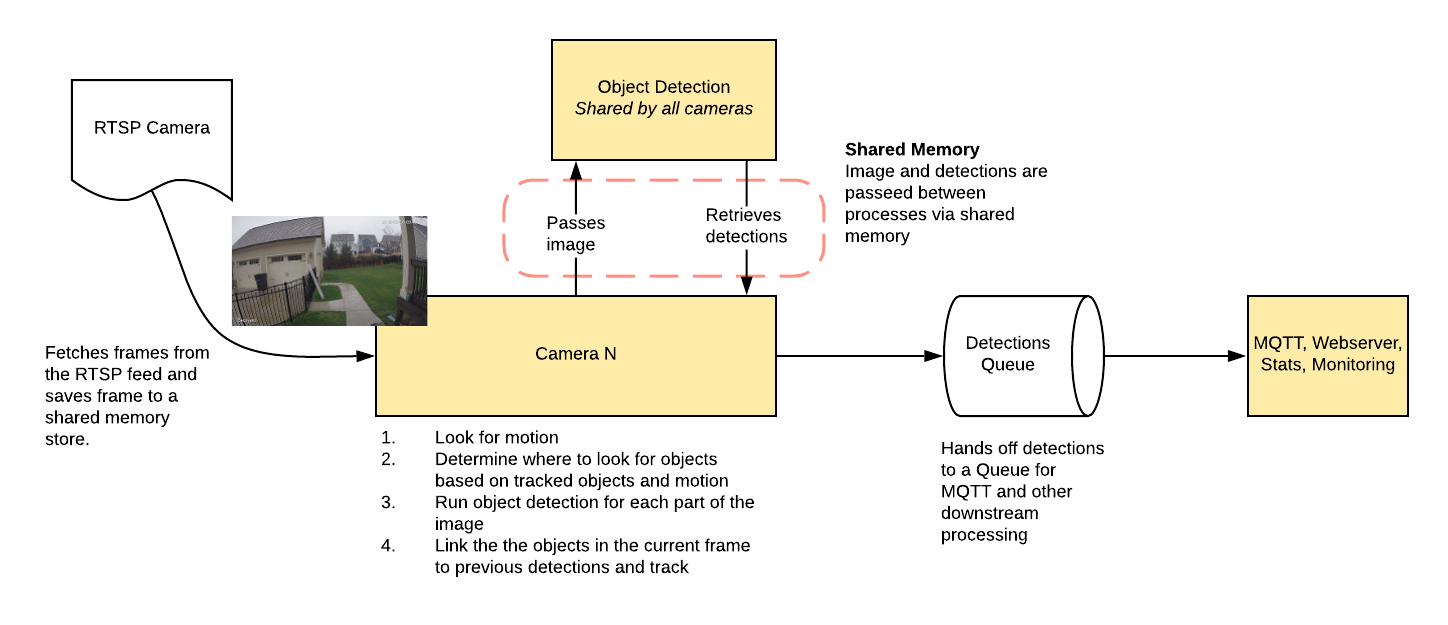
Uses OpenCV and Tensorflow to perform realtime object detection locally for IP cameras. Designed for integration with HomeAssistant or others via MQTT.
Use of a Google Coral USB Accelerator is optional, but highly recommended. On my Intel i7 processor, I can process 2-3 FPS with the CPU. The Coral can process 100+ FPS with very low CPU load.
- Leverages multiprocessing heavily with an emphasis on realtime over processing every frame
- Uses a very low overhead motion detection to determine where to run object detection
- Object detection with Tensorflow runs in a separate process
- Object info is published over MQTT for integration into HomeAssistant as a binary sensor
- An endpoint is available to view an MJPEG stream for debugging, but should not be used continuously
Example video (from older version)
You see multiple bounding boxes because it draws bounding boxes from all frames in the past 1 second where a person was detected. Not all of the bounding boxes were from the current frame.

Getting Started
Build the container with
docker build -t frigate .
Models for both CPU and EdgeTPU (Coral) are bundled in the image. You can use your own models with volume mounts:
- CPU Model:
/cpu_model.tflite - EdgeTPU Model:
/edgetpu_model.tflite - Labels:
/labelmap.txt
Run the container with
docker run --rm \
--privileged \
--shm-size=512m \ # should work for a 2-3 cameras
-v /dev/bus/usb:/dev/bus/usb \
-v <path_to_config_dir>:/config:ro \
-v /etc/localtime:/etc/localtime:ro \
-p 5000:5000 \
-e FRIGATE_RTSP_PASSWORD='password' \
frigate:latest
Example docker-compose:
frigate:
container_name: frigate
restart: unless-stopped
privileged: true
shm_size: '1g' # should work for 5-7 cameras
image: frigate:latest
volumes:
- /dev/bus/usb:/dev/bus/usb
- /etc/localtime:/etc/localtime:ro
- <path_to_config>:/config
ports:
- "5000:5000"
environment:
FRIGATE_RTSP_PASSWORD: "password"
A config.yml file must exist in the config directory. See example here and device specific info can be found here.
Access the mjpeg stream at http://localhost:5000/<camera_name> and the best snapshot for any object type with at http://localhost:5000/<camera_name>/<object_name>/best.jpg
Debug info is available at http://localhost:5000/debug/stats
Integration with HomeAssistant
camera:
- name: Camera Last Person
platform: mqtt
topic: frigate/<camera_name>/person/snapshot
- name: Camera Last Car
platform: mqtt
topic: frigate/<camera_name>/car/snapshot
binary_sensor:
- name: Camera Person
platform: mqtt
state_topic: "frigate/<camera_name>/person"
device_class: motion
availability_topic: "frigate/available"
automation:
- alias: Alert me if a person is detected while armed away
trigger:
platform: state
entity_id: binary_sensor.camera_person
from: 'off'
to: 'on'
condition:
- condition: state
entity_id: alarm_control_panel.home_alarm
state: armed_away
action:
- service: notify.user_telegram
data:
message: "A person was detected."
data:
photo:
- url: http://<ip>:5000/<camera_name>/person/best.jpg
caption: A person was detected.
sensor:
- platform: rest
name: Frigate Debug
resource: http://localhost:5000/debug/stats
scan_interval: 5
json_attributes:
- back
- coral
value_template: 'OK'
- platform: template
sensors:
back_fps:
value_template: '{{ states.sensor.frigate_debug.attributes["back"]["fps"] }}'
unit_of_measurement: 'FPS'
back_skipped_fps:
value_template: '{{ states.sensor.frigate_debug.attributes["back"]["skipped_fps"] }}'
unit_of_measurement: 'FPS'
back_detection_fps:
value_template: '{{ states.sensor.frigate_debug.attributes["back"]["detection_fps"] }}'
unit_of_measurement: 'FPS'
frigate_coral_fps:
value_template: '{{ states.sensor.frigate_debug.attributes["coral"]["fps"] }}'
unit_of_measurement: 'FPS'
frigate_coral_inference:
value_template: '{{ states.sensor.frigate_debug.attributes["coral"]["inference_speed"] }}'
unit_of_measurement: 'ms'
Tips
- Lower the framerate of the video feed on the camera to reduce the CPU usage for capturing the feed