|
|
@@ -1,14 +1,20 @@
|
|
|
-# Realtime Object Detection for RTSP Cameras
|
|
|
-This results in a MJPEG stream with objects identified that has a lower latency than directly viewing the RTSP feed with VLC.
|
|
|
-- Prioritizes realtime processing over frames per second. Dropping frames is fine.
|
|
|
-- OpenCV runs in a separate process so it can grab frames as quickly as possible to ensure there aren't old frames in the buffer
|
|
|
+# Frigate - Realtime Object Detection for RTSP Cameras
|
|
|
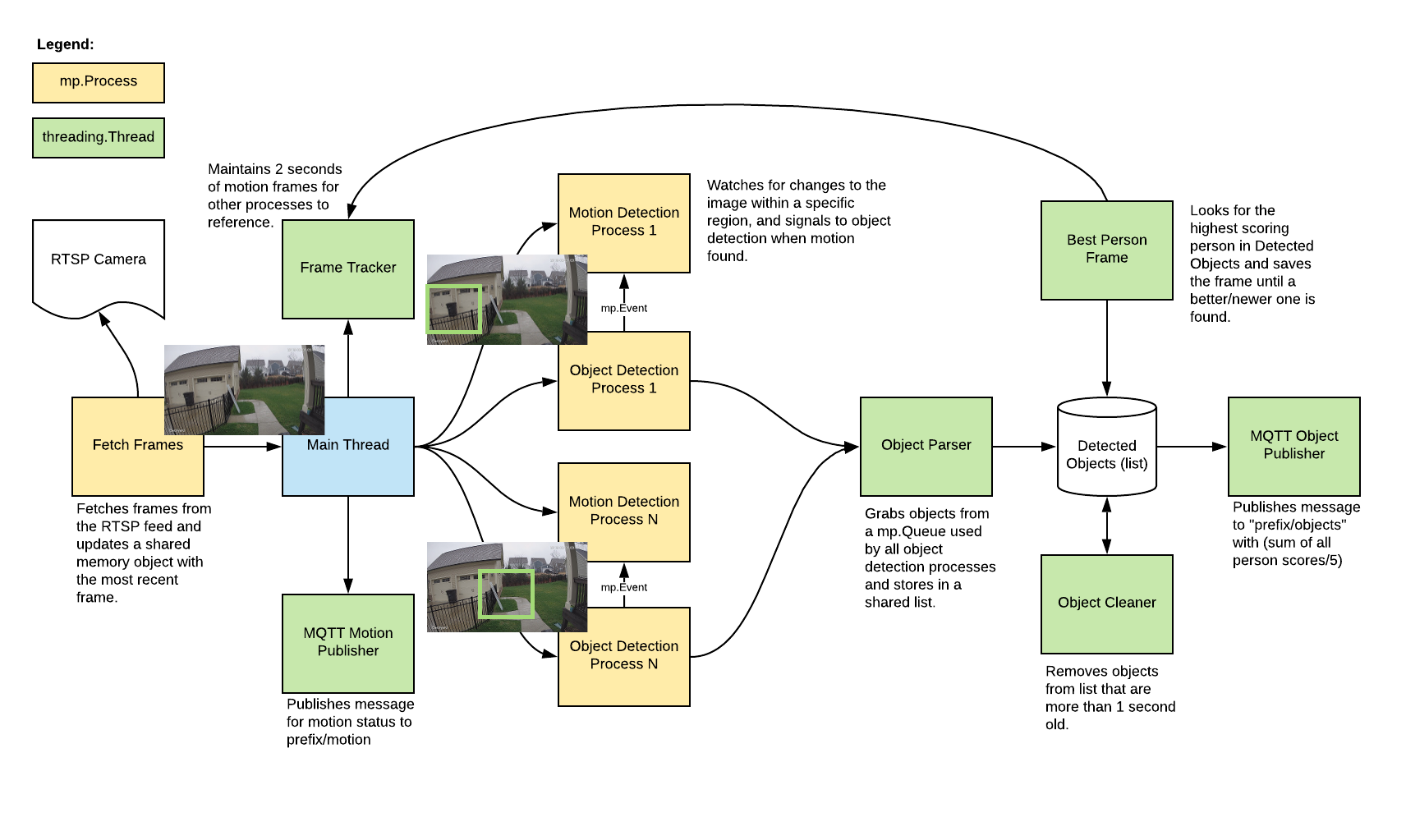
+Uses OpenCV and Tensorflow to perform realtime object detection locally for RTSP cameras. Designed for integration with HomeAssistant or others via MQTT.
|
|
|
+
|
|
|
+- Leverages multiprocessing and threads heavily with an emphasis on realtime over processing every frame
|
|
|
- Allows you to define specific regions (squares) in the image to look for motion/objects
|
|
|
-- Motion detection runs in a separate process per region and signals to object detection to avoid wasting CPU cycles to look for objects when there is no motion
|
|
|
-- Object detection with Tensorflow runs in a separate process per region and ignores frames that are more than 0.5 seconds old
|
|
|
-- Uses shared memory arrays for handing frames between processes
|
|
|
-- Provides a url for viewing the video feed at a hard coded ~5FPS as an mjpeg stream
|
|
|
-- Frames are only encoded into mjpeg stream when it is being viewed
|
|
|
-- Publishes motion and person detection scores to MQTT
|
|
|
+- Motion detection runs in a separate process per region and signals to object detection to avoid wasting CPU cycles looking for objects when there is no motion
|
|
|
+- Object detection with Tensorflow runs in a separate process per region
|
|
|
+- Detected objects are placed on a shared mp.Queue and aggregated into a list of recently detected objects in a separate thread
|
|
|
+- A person score is calculated as the sum of all scores/5
|
|
|
+- Motion and object info is published over MQTT for integration into HomeAssistant or others
|
|
|
+- An endpoint is available to view an MJPEG stream for debugging
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+## Example video
|
|
|
+You see multiple bounding boxes because it draws bounding boxes from all frames in the past 1 second where a person was detected. Not all of the bounding boxes were from the current frame.
|
|
|
+[](http://www.youtube.com/watch?v=nqHbCtyo4dY "Frigate")
|
|
|
|
|
|
## Getting Started
|
|
|
Build the container with
|
|
|
@@ -34,7 +40,7 @@ docker run --rm \
|
|
|
frigate:latest
|
|
|
```
|
|
|
|
|
|
-Example compose:
|
|
|
+Example docker-compose:
|
|
|
```
|
|
|
frigate:
|
|
|
container_name: frigate
|
|
|
@@ -56,39 +62,44 @@ Example compose:
|
|
|
|
|
|
Access the mjpeg stream at http://localhost:5000
|
|
|
|
|
|
+## Integration with HomeAssistant
|
|
|
+```
|
|
|
+camera:
|
|
|
+ - name: Camera Last Person
|
|
|
+ platform: generic
|
|
|
+ still_image_url: http://<ip>:5000/best_person.jpg
|
|
|
+
|
|
|
+binary_sensor:
|
|
|
+ - name: Camera Motion
|
|
|
+ platform: mqtt
|
|
|
+ state_topic: "cameras/1/motion"
|
|
|
+ device_class: motion
|
|
|
+ availability_topic: "cameras/1/available"
|
|
|
+
|
|
|
+sensor:
|
|
|
+ - name: Camera Person Score
|
|
|
+ platform: mqtt
|
|
|
+ state_topic: "cameras/1/objects"
|
|
|
+ value_template: '{{ value_json.person }}'
|
|
|
+ unit_of_measurement: '%'
|
|
|
+ availability_topic: "cameras/1/available"
|
|
|
+```
|
|
|
+
|
|
|
## Tips
|
|
|
-- Lower the framerate of the RTSP feed on the camera to what you want to reduce the CPU usage for capturing the feed
|
|
|
-- Use SSDLite models
|
|
|
+- Lower the framerate of the RTSP feed on the camera to reduce the CPU usage for capturing the feed
|
|
|
+- Use SSDLite models to reduce CPU usage
|
|
|
|
|
|
## Future improvements
|
|
|
-- [x] Switch to MQTT prefix
|
|
|
-- [x] Add last will and availability for MQTT
|
|
|
- [ ] Build tensorflow from source for CPU optimizations
|
|
|
- [ ] Add ability to turn detection on and off via MQTT
|
|
|
-- [x] MQTT reconnect if disconnected (and resend availability message)
|
|
|
- [ ] MQTT motion occasionally gets stuck ON
|
|
|
- [ ] Output movie clips of people for notifications, etc.
|
|
|
- [ ] Integrate with homeassistant push camera
|
|
|
-- [x] Store highest scoring person frame from most recent event
|
|
|
-- [x] Add a max size for motion and objects (height/width > 1.5, total area > 1500 and < 100,000)
|
|
|
-- [x] Make motion less sensitive to rain
|
|
|
-- [x] Use Events or Conditions to signal between threads rather than polling a value
|
|
|
-- [x] Implement a debug option to save images with detected objects
|
|
|
-- [x] Only report if x% of the recent frames have a person to avoid single frame false positives (maybe take an average of the person scores in the past x frames?)
|
|
|
-- [x] Filter out detected objects that are not the right size
|
|
|
-- [x] Make RTSP resilient to network drop outs
|
|
|
- [ ] Merge bounding boxes that span multiple regions
|
|
|
- [ ] Switch to a config file
|
|
|
- [ ] Allow motion regions to be different than object detection regions
|
|
|
- [ ] Implement mode to save labeled objects for training
|
|
|
-- [x] Add motion detection masking
|
|
|
-- [x] Change color of bounding box if motion detected
|
|
|
-- [x] Look for a subset of object types
|
|
|
- [ ] Try and reduce CPU usage by simplifying the tensorflow model to just include the objects we care about
|
|
|
-- [x] MQTT messages when detected objects change
|
|
|
-- [x] Implement basic motion detection with opencv and only look for objects in the regions with detected motion
|
|
|
-- [x] Dynamic changes to processing speed, ie. only process 1FPS unless motion detected
|
|
|
-- [x] Parallel processing to increase FPS
|
|
|
- [ ] Look into GPU accelerated decoding of RTSP stream
|
|
|
- [ ] Send video over a socket and use JSMPEG
|
|
|
|

 blakeblackshear
blakeblackshear
{kind=link}